Hallo
Ich habe mir aus dem Shop u.a. folgende Komponenten gekauft:
- Schrittmotor Nema 23 2.8A 1.15Nm 23HS5628
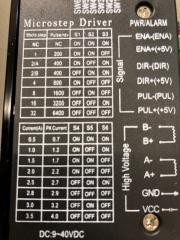
- TB6600 kompatibler Schrittmotor Treiber 4A
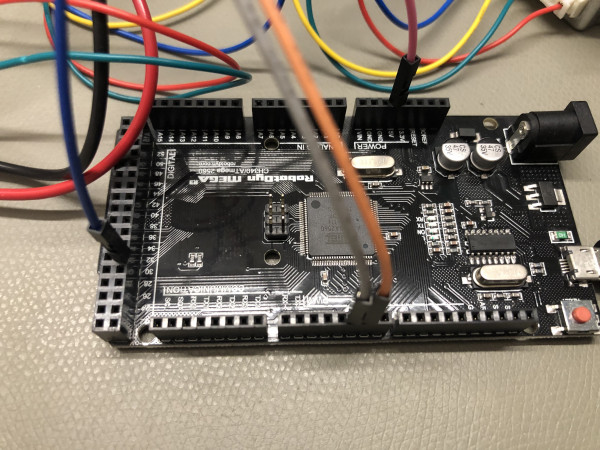
- Arduino Mega 2560
und möchte damit eine Achse meiner Fräsmaschine ansteuern.
Ich möchte hier noch erwähnen, dass ich bezüglich Arduino Neuling bin.
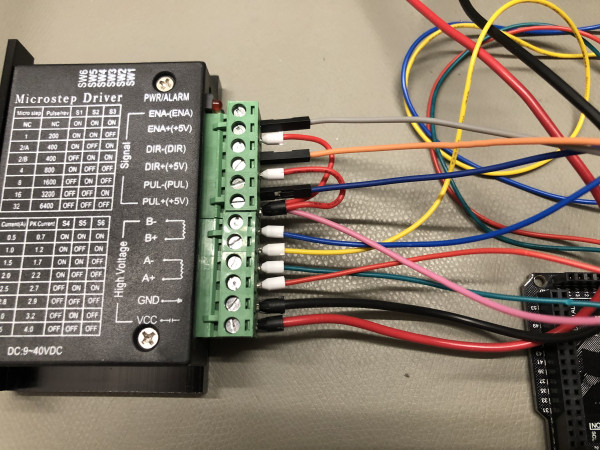
Ich habe nun die Komponenten gemäss Anleitung/Beispiel DFRobot verdrahtet:
https://wiki.dfrobot.com/TB6600_Stepper_Motor_Driver_SKU__DRI0043
Da ich ja keinen Arduino Uno sondern einen Meg habe, habe ich die Pins wie folgt geändert:
int PUL=30; //define Pulse pin
int DIR=6; //define Direction pin
int ENA=5; //define Enable Pin
Der ganze Code sieht nun so aus:
int PUL=30; //define Pulse pin
int DIR=6; //define Direction pin
int ENA=5; //define Enable Pin
void setup() {
pinMode (PUL, OUTPUT);
pinMode (DIR, OUTPUT);
pinMode (ENA, OUTPUT);
}
void loop() {
for (int i=0; i<6400; i++) //Forward 5000 steps
{
digitalWrite(DIR,LOW);
digitalWrite(ENA,HIGH);
digitalWrite(PUL,HIGH);
delayMicroseconds(50);
digitalWrite(PUL,LOW);
delayMicroseconds(50);
}
for (int i=0; i<6400; i++) //Backward 5000 steps
{
digitalWrite(DIR,HIGH);
digitalWrite(ENA,HIGH);
digitalWrite(PUL,HIGH);
delayMicroseconds(50);
digitalWrite(PUL,LOW);
delayMicroseconds(50);
}
}
Leider passiert da nicht viel. Ich hätte erwartet, dass sich die Achse ein paar mal dreht und danach die Richtung wechselt. Aber der Schrittmotor "surrt" nur, macht minimalste Bewegungen.
Könnt ihr mir helfen das ich den Schrittmotor zum drehen bekomme. Ist ja nur ein Test, Drehzahl spielt i.M. mal keine rolle, das kommt dann später.
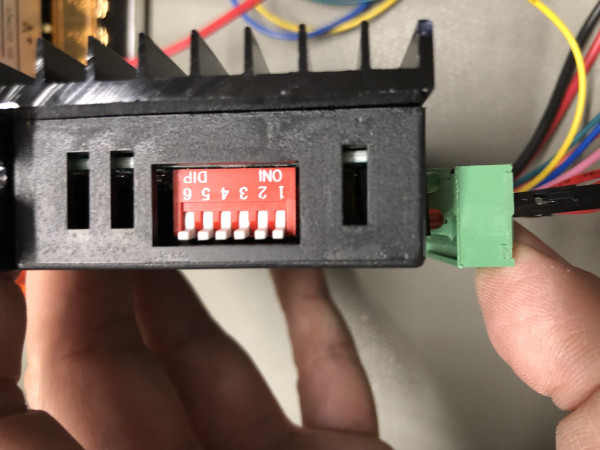
Was auch kommisch ist, der TB6600 hat für die DIP-Schalter Einstellung von 2.8 und 3.5A die gleichen Einstellungen (alle auf Off), das kann doch nicht sein?
Danke